
Los brazos robóticos y los brazos mecánicos son máquinas indispensables en la actualidad, basta con considerar qué pasaría si dejasen de existir, o si no estuviesen tan desarrollados como lo están. La producción automotriz se vería enormemente afectada y quienes carecen de alguna de sus extremidades superiores saldrían muy perjudicados.
Obsolescencia programada:
Qué es, tipos, consecuencias, empresas que la practican y alternativas
Son muchos los aspectos que hacen de los brazos mecánicos objetos muy interesantes. A continuación nos ocuparemos de hablar sobre las partes que los componen, los distintos tipos de brazos mecánicos y de las aplicaciones que reciben en la actualidad. También detallaremos algunos modelos avanzados de brazos robóticos y de brazos prostéticos para que te hagas una idea del estado actual de estos artefactos.
Qué es un brazo mecánico
Un brazo mecánico es un tipo de máquina que imita a grandes rasgos la función del brazo humano. Por lo general, los brazos mecánicos son diseñados para tener una forma similar a sus contrapartes humanas, pero esto depende de cada tipo de mano mecánica.

Los brazos mecánicos cumplen distintas funciones entre las que está servir de apoyo a las personas o sustituirlas en la realización de diferentes labores. El desarrollo tecnológico les ha permitido ocupar diversos espacios, como las líneas de montaje, la exploración aeroespacial, la medicina, y otros, siempre al servicio de las necesidades humanas.
Un subtipo bastante común de brazo mecánico lo constituyen los brazos de robot, que son los brazos mecánicos programados mediante un ordenador. Este rasgo permite que hablar de un “brazo robótico humano” sea técnicamente un error dado que, para que sea robótico, tendría que ser manejado por un ordenador y no por una persona. Una forma más adecuada sería prótesis mecánica, o brazo robótico prótesis.
La historia del brazo robótico se remonta hasta la Antigua Grecia, donde la idea de la robótica tuvo un primer precedente en los libros Neumática y Autómata de Herón de Alexandría, donde describía máquinas y artilugios cuyas funciones eran similares a las que cumplen los robots en la actualidad.
El primer brazo robótico industrial implementado en la historia fue el Unimate en el año 1960 en una fábrica de Nueva Jersey. Esta máquina tenía la función de levantar y apilar piezas de metal caliente. El Unimate, que también es el primer brazo robótico patentado, sería el brazo robot que daría pie a una nueva etapa de la industria mundial, trayendo grandes beneficios a nivel producción.
Partes de un brazo mecánico
Los brazos mecánicos funcionan a partir de la correspondencia que sus distintos componentes entre sí. Aunque las partes varían entre cada versión y proyecto de brazo robótico, es posible identificar una estructura básica que comparten la mayoría de brazos mecánicos para poder funcionar adecuadamente.
Manipulador
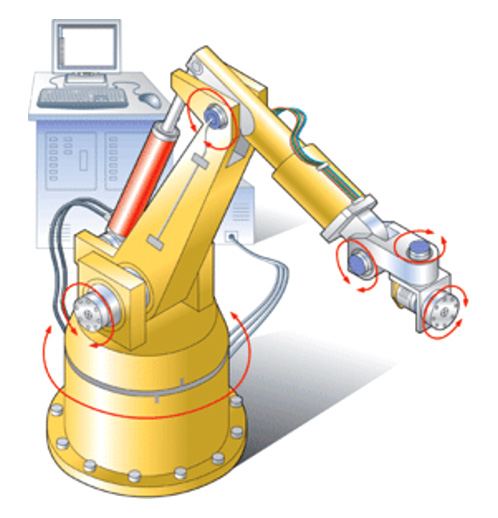
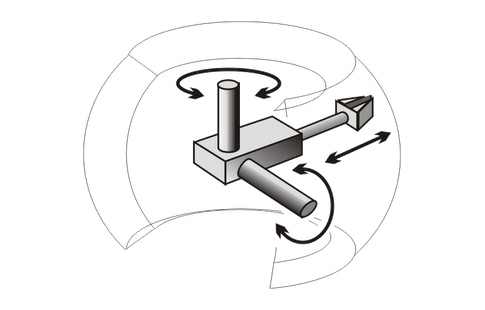
El manipulador es el componente principal de los brazos robóticos en términos mecánicos. Está formado a partir de un grupo de elementos estructurales sólidos o eslabones que están unidos mediante articulaciones. Estas articulaciones permiten un movimiento relativo cada dos eslabones consecutivos. Entre los tipos de articulaciones de un robot se pueden distinguir dos muy especiales:
- Prismática/Lineal: Es una articulación en la que el eslabón se apoya sobre un deslizador lineal. Actúa linealmente mediante los tornillos de los motores, o los cilindros.
- Rotacional: Es una junta giratoria manejada comúnmente por motores eléctricos y transmisiones, o por cilíndricos hidráulicos y palancas.
Cada articulación le provee, por lo menos, 1 grado de libertad al robot. Los grados de libertad son los movimientos independientes que una articulación puede realizar respecto a la articulación anterior.
Controlador
El controlador es el encargado de regular todos los movimientos realizados por el manipulador, así como los cálculos y procesamiento de información. El controlador recibe y envía señales de otras máquinas-herramientas gracias a dispositivos de entrada/salida, y también almacena programas.
Es posible identificar varios tipos de controladores según los grados de control, es decir, los tipos de parámetros que se regulan:
- De posición: el controlador interviene solamente en el control de la posición del actuador final.
- Cinemático: este controlador regula la posición y velocidad del manipulador
- Dinámico: además de regular la posición y la velocidad, este controlador regula las propiedades dinámicas del manipulador, y de los elementos asociados a él.
- Adaptativo: el controlador adaptativo realiza todas las funciones anteriores, y también se encarga de controlar la variación de las características del manipulador al este cambiar de posición.
Otra posible clasificación entre los controladores de un brazo robótico es aquella que distingue entre control de bucle abierto y control de bucle cerrado.
- Control de bucle cerrado: El control de bucle cerrado se realiza con un sensor de posición real montado en el elemento terminal del manipulador. La información recibida desde el sensor se compara con el valor inicial deseado, y el manipulador actúa a partir del error obtenido. La idea es que la posición real del brazo pueda coincidir con lo establecido inicialmente a partir de la retroalimentación.
- Control de bucle abierto: Un sistema de control de bucle abierto también cambia un valor físico, pero sin que haya una retroalimentación sobre la variable de salida X. Sin esta retroalimentación, el sistema de control no puede minimizar la desviación de control.
El control de bucle abierto es más simple y económico que el control en bucle cerrado, pero no puede ser usado para aplicaciones industriales por no ser tan exacto como éste, y además por ser susceptible a arrojar errores. La inmensa mayoría de brazos robóticos industriales que se usan en la actualidad dependen mucho del proceso de retroalimentación que efectúan los controladores de bucle cerrado.
Actuadores
Los actuadores son las partes del brazo robótico que se encargan de producir el movimiento en las articulaciones, sea de manera directa o por medio de cables, poleas, antenas, etcétera. También se les conoce como elementos motrices, y pueden clasificarse en tres grandes grupos:
- Neumáticos: usan aire comprimido como fuente de energía. Su precisión es limitada, pero son perfectos para la realización de movimientos rápidos.
- Hidráulicos: son muy buenos en los manipuladores que tienen una gran capacidad de carga, pero que requieren también de una regulación precisa de la velocidad.
- Eléctricos: los actuadores eléctricos son los más usados debido a su facilidad de control y precisión.
Efector terminal
El efector terminal es la garra o herramienta que se acopla a la muñeca del manipulador, y entre las partes de un brazo robótico, esta es la que realiza la labor prevista para el brazo robótico. Por ende, es posible encontrar diferentes efectores terminales, como pinzas, tenazas, electroimanes, u otro aparato.
Muchas veces, el manipulador tiene que diseñado para que pueda cargar con el efector terminal que está previsto a usar.
Tipos de brazos mecánicos
En la actualidad es posible distinguir varios tipos de brazos robóticos según su forma y aplicaciones. Como cabe esperar, la estructura de un brazo robótico varía para poder especializarlo a la tarea que el brazo está dirigido a cumplir, razón por la que existen diferentes tipos de brazos robóticos en la actualidad. Algunos de los más comunes son los siguientes:
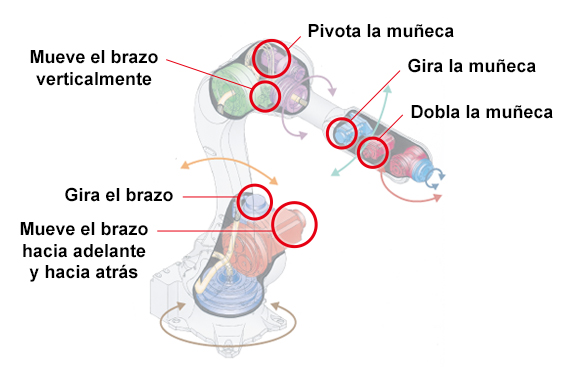
Brazo articulado industrial
El robot articulado es un tipo de brazo mecánico que se encuentra comúnmente en las cadenas de montaje automotriz. Estas máquinas suelen incorporar entre 3 y 7 ejes que les permiten muchas facilidades como la manipulación, sujeción de piezas y de herramientas. Debido a esto, el brazo articulado industrial se ha vuelto un componente indispensable para el sector automotriz.

Este brazo manipulador puede integrar varias tecnologías según su función. Algunas de estas son rayos infrarrojos, visión artificial, capacidad de realizar radiografías, y otras.
Brazo robótico cartesiano
Un robot cartesiano es un tipo de brazo mecánico que cuenta con tres articulaciones, y cuyos ejes coinciden con los ejes cartesianos. El brazo robótico cartesiano se caracteriza por formar un ángulo recto, y porque no puede rotar.
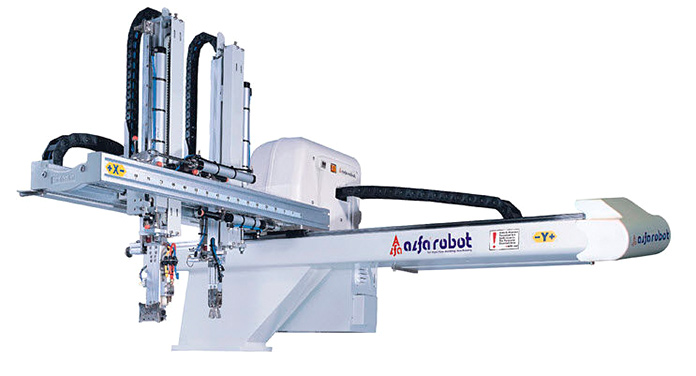
Este brazo eléctrico se desempeña en operaciones de ensamblado, soldadura, manipulación de objetos y en aplicación de impermeables.
Robot Scara
Un robot Scara es un robot que dispone de dos articulaciones rotatorias y paralelas que le brinda elasticidad en un plano de cuatro grados de libertad.

Este tipo de brazo mecánico industrial se utiliza principalmente para tareas de tipo “pick and place”, es decir, de tomar objetos y colocarlos en un determinado lugar. También se pueden usar para aplicar impermeabilizantes y ensamblados.
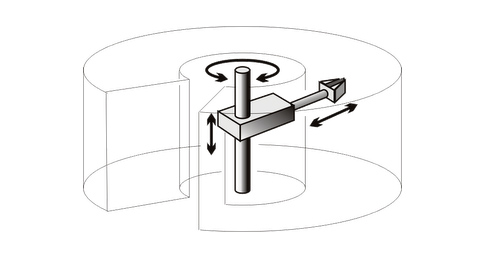
Brazo robótico cilíndrico
El robot cilíndrico o brazo robótico cilíndrico es un robot cuyos ejes conforman un sistema de coordenadas de círculos concéntricos. Dicho sistema de coordenadas le facilita la manipulación de herramientas, la soldadura de punto, la maquinaria de fundición a presión, y operaciones de ensamblado.
Robot esférico
Un robot esférico o robot polar es un tipo de brazo robótico cuyos ejes están distribuidos de manera que formen un sistema polar de coordenadas. Este tipo de brazo hidráulico industrial se emplea principalmente para la soldadura por puntos y por gas, para la manipulación de máquinas con herramientas, y en máquinas de desbardado.
Brazo de prótesis
Un brazo de prótesis es un tipo de brazo mecánico dirigido al uso humano, específicamente a las personas que han perdido una o ambas extremidades superiores por alguna circunstancia. La idea detrás de estas prótesis es que los pacientes puedan tener cierta normalidad a pesar de la pérdida de la extremidad.
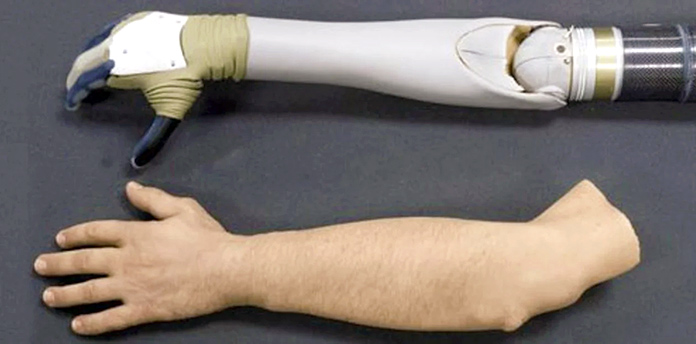
El desarrollo de un brazo de prótesis es un proceso complejo debido a que el paciente debe ser capaz de moverlo de una manera similar a su brazo original, lo que involucra un importante trabajo multidisciplinario.
Aplicaciones de los brazos mecánicos
Las aplicaciones de brazos o manos robóticas han aumentado significativamente de unos años hasta el presente por el desarrollo de la tecnología y la ciencia, lo que ha permitido la elaboración de distintas articulaciones robóticas o mecánicas que se han hecho importantes para varios aspectos de la vida humana. A continuación mencionamos algunas de sus aplicaciones actuales.
Producción industrial
Los brazos mecánicos han tenido un lugar importante en la producción industrial a partir del robot automotriz, que son los autómatas que forman parte de los procesos industriales de producción. Los brazos robóticos en la industria facilitan y hasta sustituyen la acción humana, lo que se ha traducido en un aumento de la productividad.

En particular, la industria automotriz se ha beneficiado mucho de la inclusión de estos manipuladores robóticos, capaces de levantar objetos bastante pesados y de trabajar conjuntamente en líneas de montaje.
Prostética
La prostética se ha beneficiado mucho de los brazos robóticos para humanos porque ellos permiten que las personas que hayan perdido una o ambas extremidades superiores tengan un estilo de vida relativamente normal con su mano robot.

La elaboración de prótesis se ha especializado para satisfacer las necesidades de los pacientes, así como las exigencias de los oficios que pueden practicar. Dicha especialización toma en cuenta los requerimientos que exige cada oficio para que el paciente pueda tener el mejor rendimiento posible.
Operaciones quirúrgicas
Otra de las aplicaciones de un brazo robótico en la medicina es su uso en la sala de operaciones en lo que son denominadas las cirugías robóticas, o cirugías asistidas con robot. Estas operaciones, que comúnmente incluyen un robot de brazo articulado, son realizadas con una mayor precisión, control y flexibilidad respecto a las técnicas convencionales.

El sistema quirúrgico robótico clínico más usado actualmente tiene un brazo para la cámara y brazos mecánicos con instrumentos montados en ellos. El cirujano regula los movimientos de los brazos mientras está sentado cerca de una consola de computadora cerca de la mesa de operaciones.
Exploración aeroespacial
Los rover son vehículos elaborados para la exploración aeroespacial en otros cuerpos celestes y que emplean brazos robóticos. La función de los brazos en estos robots mecánicos es la de facilitar la exploración de la superficie donde el rover se encuentra, cosa que hacía el brazo robótico del Curiosity, un rover enviado a Marte en 2012 y que todavía se encuentra operativo.
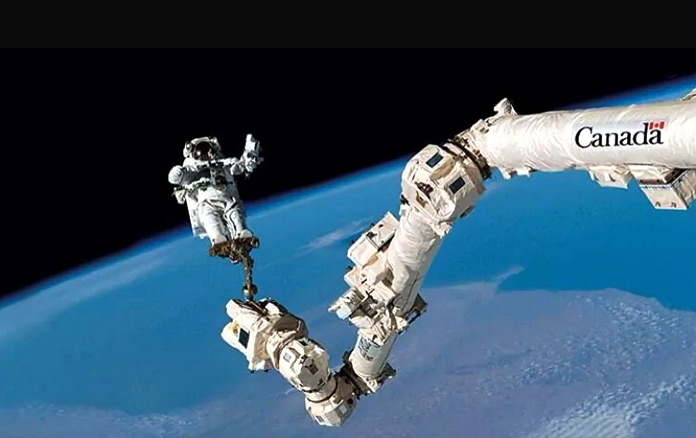
El Canadarm es otro robot articulado usado para la exploración espacial. Este brazo robótico fue usado en los transbordadores espaciales para maniobrar diferentes cargas.
Fabricantes, modelos y precios de brazos mecánicos
El mercado de los brazos mecánicos está en constante expansión, sean estos para uso doméstico, industrial, o para sustituir una extremidad perdida. Si estás interesado en comprar un brazo robótico o en conocer el precio de un brazo robótico industrial, puede que las siguientes ofertas sean un punto inicial que te ayude a tener una idea de qué puedes esperar.
Hero Arm de Open Bionics
El Hero Arm es un brazo biónico ofertado por Open Bionics, una empresa líder en el área de la robótica. El Hero Arm es elaborado a partir de la tecnología de las impresoras 3D, lo que supone un importante ahorro de tiempo y de dinero que hace que estas prótesis sean más accesibles respecto a sus competidores directos.

Según Open Bionics, los sensores musculares del Hero Arm le permiten realizar movimientos bastante similares a los de un brazo normal, así como distintos tipos de agarre. El Hero Arm pesa menos de 1 kilogramo, y puede ser usado por cualquier persona a partir de los 8 años.
Precio: 3.000 USD / 2.553,69 EUR.
Adeept, un brazo de robot con pantalla OLED
Este es un brazo robótico de escritorio compatible con Arduino IDE. Como es una máquina de código abierto, su dueño puede ampliar el número de operaciones que puede hacer. Generalmente es empleado para el uso doméstico.
La garra de 5 ejes le permite al brazo moverse de manera flexible, así como poder agarrar objetos en cualquier dirección. Por otro lado, la pantalla OLED ofrece un conteo de los movimientos realizados y los que faltan por hacer, así como el estado en que se encuentre el brazo.
Precio: 69,51 USD / 59,18 EUR.
Gowe-AS-6DOF
El AS-6DOF es un brazo robótico completamente automatizado que puede adaptarse a las tareas prescritas por su dueño. Por sus amplias capacidades, es posible verlo en el entorno industrial, en medicina, servicios de entretenimiento, educación, y áreas de exploración militar y espacial.

Si este robot es instalado en una plataforma móvil, es capaz de terminar el trabajo empezado por trabajadores humanos, lo que es especialmente útil en un entorno peligroso.
Precio: 622,12 USD / 529,64 EUR.
Velleman-KSR12
Este brazo hidráulico fabricado por Velleman está dirigido especialmente a los adolescentes que quieran familiarizarse con la robótica, razón por la que Velleman indica que la edad recomendada empieza a partir de los 14 años.
EL KSR12 funciona completamente con agua, por lo que no requiere baterías para ser usado. Incluye 6 palancas para realizar movimientos.
Precio: 55,84 USD / 47,54 EUR:
Los brazos robóticos más avanzados de la industria
El continuo progreso que ha tenido la ingeniería y la tecnología en general ha dado lugar a brazos robóticos que destacan sobre la mayoría gracias a las funciones que pueden ejecutar, que repercute también en lo útiles que pueden ser para los fines del entorno en que sean empleados.
A continuación presentamos algunos de los brazos robóticos más avanzados a modo de ilustrar qué tan desarrollados están los brazos robóticos en los tiempos que corren.
B1-O y NC-1
B1-0 y NC-1 son un par de brazos robóticos que cumplen la función de servir bebidas alcohólicas en el Bionic Bar, un bar incluido en un crucero llamado Harmony of the Seas y que empezó operaciones en 2016. Este par de brazos robóticos es capaz de servir dos bebidas por minuto, teniendo una productividad máxima de 1.000 tragos por día.
Estos brazos despliegan un pequeño show de luces poco después de haber elegido la bebida a servir, una propuesta tan llamativa que un segundo set de brazos robóticos fue instalado en 2017 en el crucero Anthem of the Seas.
Iron Ox
La empresa Iron Ox ha desarrollado pequeñas granjas robóticas especializadas en el cuidado y recolección de verduras. Estas granjas hacen uso de un brazo robótico que recoge los cultivos y que, gracias a sus dos ojos, es capaz de constar su estado y comprobar si están creciendo adecuadamente.
Esta granja robótica emplea un sistema de cultivo hidropónico que usa un 90% de agua que las técnicas de cultivo tradicional, pero que produce 30 veces la cantidad de cultivos por media hectárea de tierra.
Delft Arm
El Laboratorio de Biorobótica de Delft (DBL por sus siglas en inglés) está desarrollando un proyecto de brazo mecánico que pueda ser usado a partir de un bajo suministro de energía a los motores.
Por los momentos, El Delft Arm tiene cuatro grados de libertad, y dado que puede ser usado sin una importante fuente de suministro energético, este brazo es considerablemente más accesible que la mayoría de los brazos robóticos industriales.
Elu-2 Arm
El Elu-2 Arm es un brazo robótico elaborado por Elumotion que puede aproximarse a los movimientos que ejecutaría un brazo humano normal a velocidades bastante similares a la humana, por lo estaría capacitado para interactuar con las personas.
El Elu-2 Arm cuenta con 9 grados de libertad integrados en su estructura y que no solamente le permiten realizar movimientos similares al humano, sino también poder recoger y sostener diversas herramientas.
Robonaut Arms
Los Robonaut Arms son un conjunto de manipuladores robóticos hechos a escala humana para adherirse al exterior de un traje de astronauta. Son desarrollados por la NASA para poder soportar los entornos al vacío del espacio exterior.
El diseño, fuerza y alcance de los Robonaut Arms son equivalentes a los de un brazo humano normal, pero su conjunto de articulaciones le permite realizar más y mejores movimientos. Además, cuentan con capas de fibra sintéticas que brindan protección contra variaciones de temperatura.
Las prótesis robóticas más avanzadas del mercado
Así como los brazos robóticos industriales, hay prótesis robóticas que destacan sobre el resto por las funciones que pueden cumplir y, en general, por lo especializadas que están respecto a los modelos más comunes del mercado prostético actual. Entre más desarrollada esté la prótesis, más fácil será su manejo para el usuario, que se verá posibilitado de hacer más acciones respecto a una prótesis más básica.
A modo de ejemplo, te presentamos 3 modelos de brazos prostéticos con funcionalidades avanzadas y que han sido relevantes en la actualidad.
Miembro Prostético Modular (MPL)
El Miembro Prostético Modular (MPL por sus siglas en inglés) es un proyecto de la División de Investigación y Desarrollo Militar de los Estados Unidos (DARPA) junto con el Laboratorio de Física Aplicada de la Universidad John Hopkins.
Esta prótesis forma parte de un programa enfocado en prótesis para las extremidades superiores cuyo objetivo es poder elaborar miembros artificiales que respondan a la actividad neuronal del usuario y puedan realizar funciones motoras de manera natural. En otros términos, es un brazo que puede ser controlado con la mente.
Actualmente, una versión del MPL está siendo probada por Johhny Matheny, un civil estadounidense cuyo brazo izquierdo fue amputado en el 2005 debido a un cáncer y que se hizo voluntario del programa entre DARPA y la Universidad John Hopkins. Desde 2018, Johnny ha estado usando el brazo en condiciones reales, es decir, fuera de la universidad, aunque siempre es monitoreado por los expertos.
Por el momento, Johnny puede sentir la presencia de la extremidad, pero no sensaciones, lo que se debe a que la conexión entre el cerebro con los sensores integrados a la prótesis no está lo suficientemente desarrollada, pero los especialistas afirman que es un trabajo en proceso.
Alternative Limb Project
El Alternative Limb Project, o Proyecto de Extremidad Alternativa, es una iniciativa que la empresa de videojuegos Konami lleva en conjunto con médicos expertos de la empresa Open Bionics. La premisa del proyecto es elaborar brazos mecánicos que acompañen la personalidad de sus usuarios y que, en definitiva, se integren a su vida.
En la actualidad, el británico James Young es el máximo exponente del proyecto, usando un brazo que destaca por su diseño y funciones. Este es un brazo mecánico elaborado a partir de metal y cuya mano está compuesta de plástico. Según los encargados, el diseño del brazo fue inspirado por Snake, personaje de la franquicia Metal Gear Solid y que es desarrollada por Konami.

Este brazo mecánico está conectado a los nervios y músculos de hombros. Los estímulos nerviosos de los músculos son recogidos por sensores adheridos a la piel del hombro, y viajan hacia la parte superior del cuerpo para poder operar el brazo.
Esta pieza de Alternative Limb Project cuenta con varias tecnologías, como una entrada USB para cargar un móvil, un rayo láser (sin uso práctico), un pequeño encendedor, un reloj, e incluso un pequeño dron que es almacenado en un panel en la parte externa de su hombro.
Luke Arm
El Luke Arm es otra iniciativa de brazos biónicos impulsada por DARPA. Esta vez, la división estadounidense se alió con DEKA, una compañía especializada en el desarrollo de brazos robóticos, mediante una solicitud enviada a ellos en 2006 para dar comienzo al desarrollo de una prótesis que pudiese ser usada por los soldados que perdiesen sus extremidades por la Guerra de Irak y Afganistán.

La prótesis estuvo lista en 2014, y empezó a ser comercializada dos años después. Ella puede ser controlada mediante señales electromiografícas, que son recibidas por electrodos implantados en los nervios cubital y medial. Una Unidad de Medición Inercial en los zapatos del paciente también se encarga de la manipulación de esta pieza, permitiendo que el usuario controle los movimientos de la muñeca y la rotación del brazo respecto al cuerpo.
El nombre es un homenaje a Luke Skywalker, un personaje de la franquicia Star Wars que pierde su brazo frente a Darth Vader en la película El Imperio Contraataca.
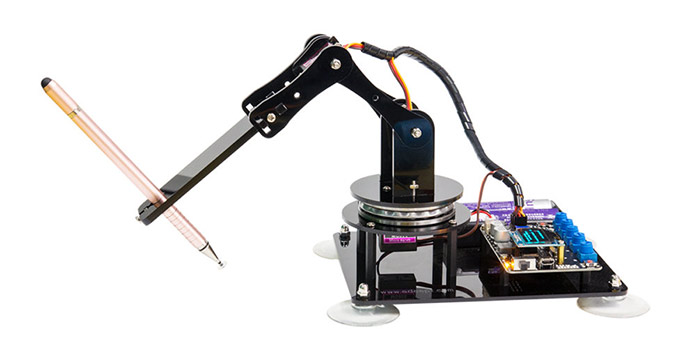
Cómo hacer un brazo robótico casero
Contar con un brazo mecánico casero es un asunto más sencillo de lo que podría pensarse inicialmente. En la actualidad existen kits con los materiales e instrucciones necesarias para la elaboración de este tipo de artefactos, siendo dos de los más comunes el brazo robótico acrílico y el brazo robótico de Arduino o con Arduino, que es un tipo específico de entorno.
Pasaremos a indicar cómo hacer un brazo robótico con Arduino, no sin antes señalar los materiales para un brazo robótico de este tipo para poder referirse a los pasos necesarios.
Materiales necesarios
- Placa Arduino
- Cables unifilares
- Plataforma de metacrilato
- Dos conjuntos de motor
- Dos ruedas
- Rack para 4 pilas doble AA
- Controlador de motores doble
Pasos para la construcción
- Suelda los cables unifilares en los bordes de cada motor, un cable rojo y uno negro por cada uno.
- Acopla las dos ruedas consigo mismas.
- Sujeta los dos soportes metálicos incluidos en los conjuntos motores con tornillos largos.
- Coloca las ruedas en el extremo opuesto del eje blanco de plástico que sobresale del conjunto motor. Habiendo sido colocadas, sujétalas al soporte de metacrilato.
- Sujeta el rack de las pilas en la plataforma.
- Configura el controlador de los motores
- Escribe el código fuente de Arduino.
Preguntas frecuentes (FAQ)
En esta sección repasaremos rápidamente algunas de las secciones mencionadas anteriormente, como la definición de brazo robótico, la explicación de brazo hidráulico, los tipos de brazos mecánicos, y la historia del brazo hidráulico.
» ¿Qué es un brazo mecánico?
Un brazo mecánico es una máquina que imita las funciones de un brazo humano. En general, los brazos mecánicos aumentan o sustituyen las capacidades del brazo humano, lo que permite la realización de tareas difíciles o imposibles de hacer para estos últimos. Esto ha hecho que los brazos mecánicos cuenten con presencia en distintos ámbitos.
» ¿Qué es un brazo robótico?
Un brazo robótico es un tipo de brazo mecánico que es controlado mediante un ordenador que regula sus funciones. Estas máquinas cuentan con autonomía relativa respecto a otros brazos mecánicos en la medida en que los ordenadores a los que están asociados realizan cálculos para determinar el mejor curso de acción posible.
» ¿Cómo funciona un brazo robótico?
El brazo robótico actúa junto con el ordenador a partir de dispositivos de salida/entrada que le permiten recibir los comandos del ordenador mientras envía información a este. Recibidos los comandos, el brazo robótico los cumple, exhibiendo mayor o menos destreza según sus componentes.
» ¿Para qué sirve un brazo robótico?
- Ensamblado
- Soldadura por puntos
- Soldadura de gas
- Manipulación de objetos y herramientas
- Pick and place
- Aplicación de impermeabilizantes
- Fundición a presión
» ¿Qué tipos de brazos robóticos existen?
- Robot articulado
- Robot cilíndrico
- Robot esférico/robot polar
- Robot Scara
- Robot cartesiano
- Prótesis
» ¿Qué es un brazo hidráulico?
Un brazo hidráulico es un tipo de brazo mecánico que transforma la energía hidráulica en energía mecánica, permitiéndole realizar movimientos axiales (lineales o traslacionales) mientras que también transmite fuerza. Este brazo mecánico es calificado como “hidráulico” porque los movimientos que realiza se deben a la presión de un líquido, que serían un aceite mecánico y un gas que están bajo presión.
» ¿Para qué sirve el brazo hidráulico?
- Transporte de carga
- Trazado y dibujado
- Manipulación de objetos
- Uso de elevadores
» ¿Quién inventó el brazo hidráulico?
Aunque el brazo hidráulico existió de manera primitiva desde hace miles de años, fue George C. Devol (1912-2011) quien perfeccionó el brazo hidráulico en la forma de un robot industrial, Unimate, que fue patentado en el año 1954 en los Estados Unidos y que fue vendido a General Motors en 1961.
Las características de los brazos robóticos, y de los brazos mecánicos en general, los convierten en herramientas vitales para la humanidad en los tiempos que corren, y no parece que esta tendencia cambie si consideramos que se siguen realizando investigaciones que apuntan a impulsar el desarrollo y masificación de estos instrumentos en muchos aspectos de nuestra vida diaria.
Una muy buena explicación de los brazos mecánicos, es la base perfecta para los usuarios que se quieren introducir en el mundo de la automatización de procesos industriales